






















2.380,00 TL
Monster Moto Shield VNH3ASP30(VNH2SP30 Stop Production) Yüksek Akım Step Motor Sürücüsü 30A, esasen Ardumoto motor sürücü kalkanımızın yükseltilmiş bir versiyonudur. Bu Monster Moto Shield için, L298 H köprüsünü bir çift VNH3ASP30 tam köprü motor sürücüsü ile değiştirilmiştir. Ayrıca destek devresi güçlendirilmiştir, böylece bu kart bir çift yüksek akım motorunu çalıştırabilir. VIN ve motor çıkışı, 5mm vidalı terminalleri için eğimlidir, bu da daha büyük ölçü kablolarının bağlanmasını kolaylaştırmaktadır.
1 adet stokta



Henüz üye olmadın mı?
Hesap oluştur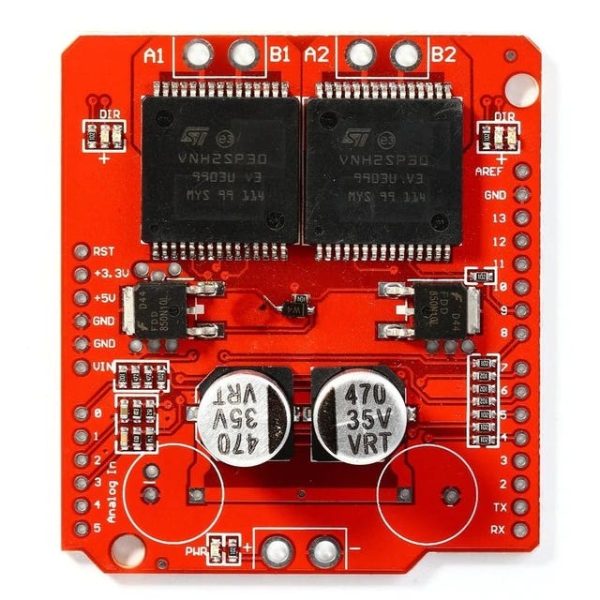
1 adet stokta













































































kamil –
4×4 rover robot için kullanmak için sipariş ettim