























6.670,00 TL
Kağıt üzerine çeşitli şekiller çizen yazılar yazan xy plotter dediğimiz sistemleri sitemizi takip edenler bilirler.Bu robot bu sistemlerden biraz daha farklı olarak tekerlekleri üzerinde bir araba gibi hareket ederek programındaki şekilleri çizebilmektedir. Robotun plastik parçalarının büyük bir kısmı 3d yazıcı ile çıkartılmıştır.
2 adet stokta

| Ürün Markası |
Yapboz |
|---|




Henüz üye olmadın mı?
Hesap oluştur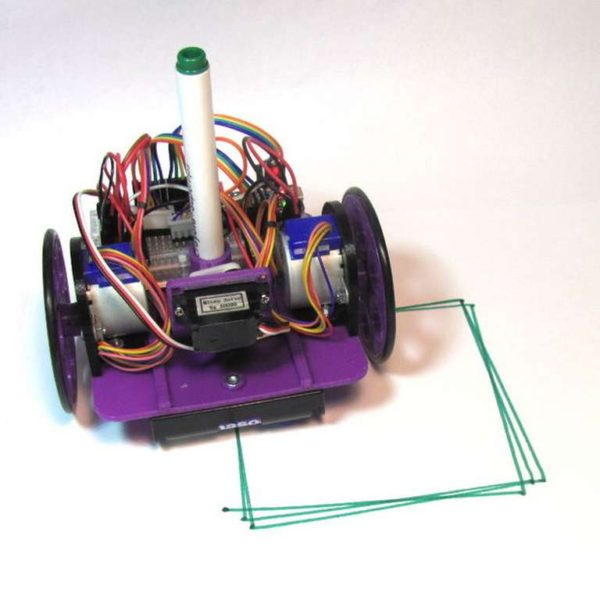
2 adet stokta














































































Değerlendirmeler
Henüz değerlendirme yapılmadı.