



L293D Motor Sürücü Entegresi
19,95 TL
L293D Motor Sürücü entegresi DIP-16 kılıftadır. 4.5 V – 36 V arasında giriş gerilimine sahip olan bu Motor Sürücü entegresi 39 V’a kadar çıkış gerilimi sunmaktadır. Toplamda 4 adet çıkışa sahip olan bu Motor Sürücü entegresi bu çıkışlardan 1.2A ‘e kadar akım verebilmektedir. Bu Motor Sürücü entegresi Half H Bridge sürücü konfigürasyonunu kullanmaktadır.L293D Motor Sürücü entegresinin fonksiyonlarını ve işlevlerini daha detaylı görebilmek için mutlaka bu entegrenin datasheetini inceleyin.
Stokta yok




İlgili ürünler

2.4 inch Dokunmatik TFT Ekran

5mm Şeffaf RGB LED
RGB – Red (kırmızı) , Green (yeşil) , Blue (mavi) renklerin baş harfleri birleştirilerek oluşmuş bir terimdir. Genel çalışma prensipi; bu üç rengi kullanarak, farklı kombinasyonlarda, çok fazla renk verebilir. Konumuz olan RGB LED ‘ler, bir kontrol devresi yardımıyla 16 renk verebilmektedirler.RGB ledlerde ise durum oldukça ilginç. Tek bir RGB led ile ister kırmızı, ister sarı, ister yeşil veya başka bir rengi kolaylıkla üretebilirsiniz. Özellikle amacınız devrenizi sadeleştirmek ve daha küçük bir hale getirmek ise üç adet veya daha fazla led kullanmak yerine tek bir RGB ile istediğiniz bir rengi rahatlıkla üretebilirsiniz.
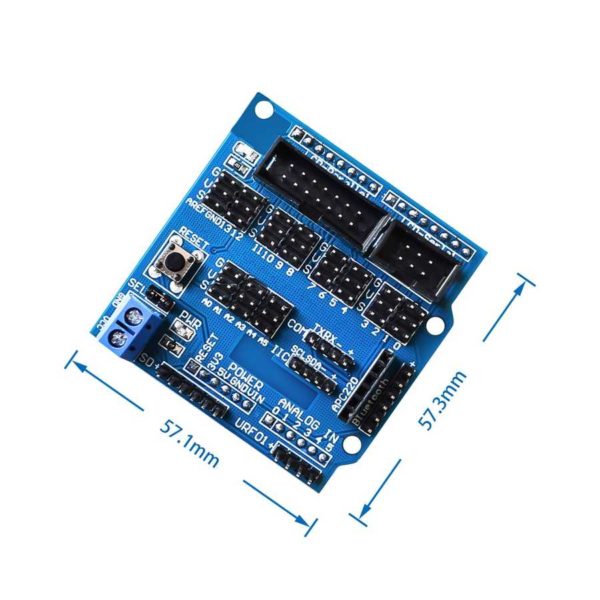
Arduino Sensor Shield V5.0

Buzzer











Değerlendirmeler
Henüz değerlendirme yapılmadı.