





















28,00 TL
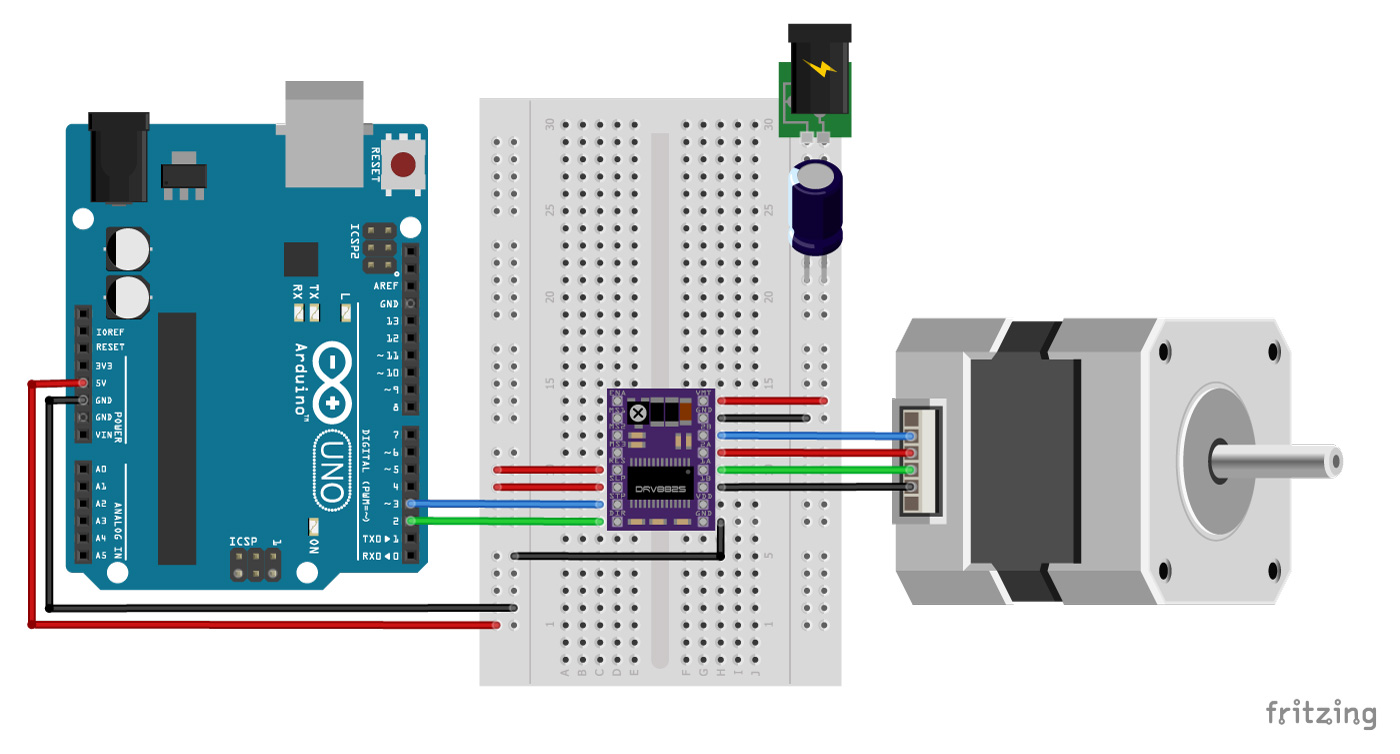
DRV8825 step motor sürücü kartı, kanal başına 1.5A akım verebilmektedir. Zorlanma ve ani durumlarda bu değer 2.2A’e kadar çıkabilmektedir. Sürücü ayarlanabilir akım sınırlaması, aşırı akım ve aşırı sıcaklık koruması ve altı mikrostep çözünürlük(1/32 Step) özelliklerine sahiptir. 8.2V ve 45V arasında geniş bir çalışma voltaj aralığı ile bir çok projede rahatlıkla kullanılabilinmektedir.
Stokta yok

Henüz üye olmadın mı?
Hesap oluştur Stokta yok

















































































Değerlendirmeler
Henüz değerlendirme yapılmadı.