





















7.550,00 TL
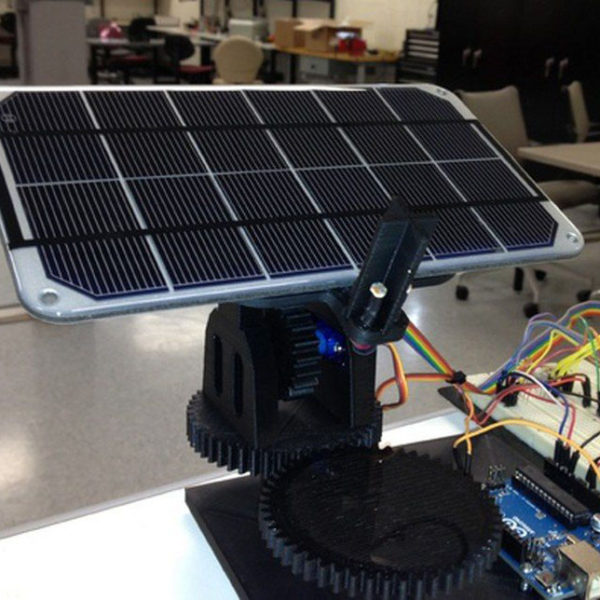
Mekanik kısmını 3D printer ile çıktı alınmış otomasyon kısmında ise arduinonun geniş kütüphanesinden faydalanılmıştır.Projemizde makara sistemini hareket ettirebilmek için step motor kullanılmıştır.
Stokta yok



Henüz üye olmadın mı?
Hesap oluştur
Stokta yok















































































Değerlendirmeler
Henüz değerlendirme yapılmadı.