





















8.650,00 TL
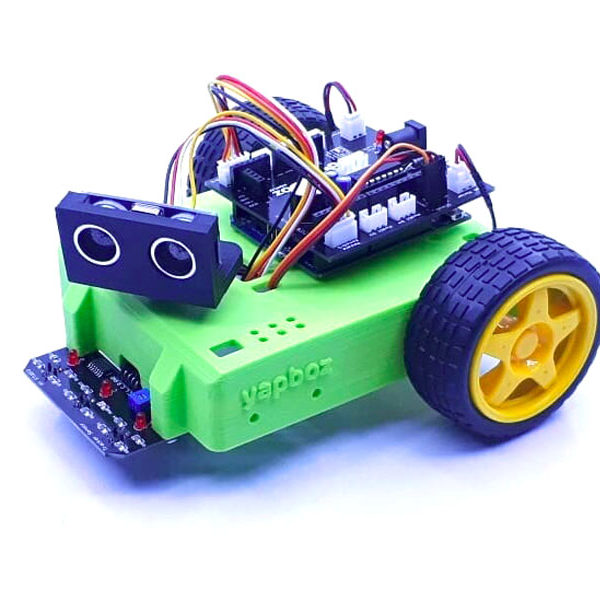
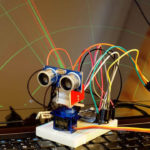
Robot kol ve robot arabın bir projede kullanılıp işlevsel hale getirilmiştir. Bu proje ile robotunuzu mobil uygulama üzerinden yönlendirebilir istediğiniz komutları uygulattırabilirsiniz. Robot kol ve arabanın bazı parçaları 3D yazıcı ile üretilmektedir.
Stokta yok


| Ürün Markası |
Yapboz |
|---|







Henüz üye olmadın mı?
Hesap oluştur
Stokta yok












































































Değerlendirmeler
Henüz değerlendirme yapılmadı.