





















5.450,00 TL
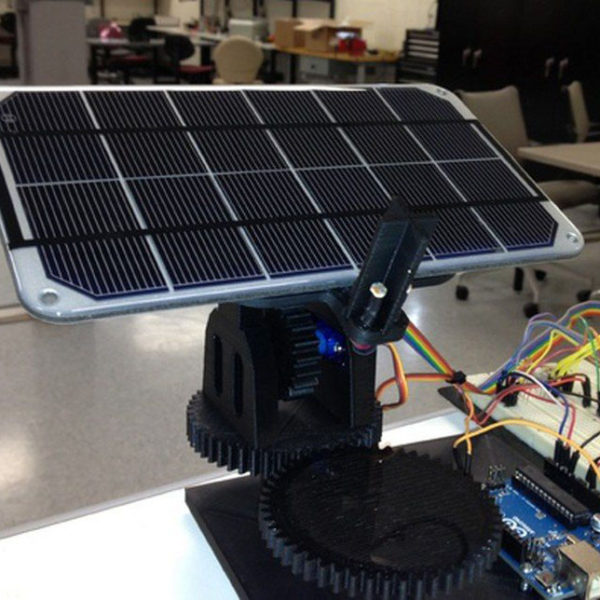
Arduino ve android kontrollü robot projesinin demonte kitidir.Resimde görüldüğü gibi örümcek robot 4 bacaklı ve her bacakta 3 adet SG90 9gr servo motor bulunmaktadır.Motorları kontrol etmek için arduino uno ve sensor shield v5 kullanılmıştır.Cep telefonu programı ile haberleşmek için HC-06 bluetooth modülü mecvuttur.Robot parçaları ile birlikte batarya gönderilmemektedir.Bataryayı harici almanız gerekiyor.
Stokta yok




| Ürün Markası |
Yapboz |
|---|






Henüz üye olmadın mı?
Hesap oluştur
Stokta yok














































































Aysema Hancı –
Set eksiksiz geldi teşekkürler
Mehmet –
3d baskılar güzel çıkmış motorlar kaliteliydi
emel tataroğlu –
Ürün harika fiyat olarak piyasanın en ucuzu eksiksiz geldi. Sadece paketten batarya çıkmıyor kendimiz aldık
İshak –
Arduino:1.8.19 (Windows 10), Kart:”Arduino Nano”
kod:3:10: fatal error: FlexiTimer2.h: No such file or directory
compilation terminated.
exit status 1
FlexiTimer2.h: No such file or directory
Kod bu şekilde hata veriyor lütfen email üzerinden yardımcı olunuz
y –
kodun içindeki FlexiTimer2 kutuphanesini bulamıyorum. yardımcı olurmusunuz. Kod hata veriyor
Proje Hocam –
FlexiTimer2 kütüphanesini arduino programınıza eklemeniz gerekmektedir. Proje dosyasında kütüphane mevcuttur.
Yusuf –
Pil olarak ne kullanmalıyım 12 adet servo icin dc dc donusturucu kaç amper olmali