



Android Kontrollü RC Araba
5.380,00 TL
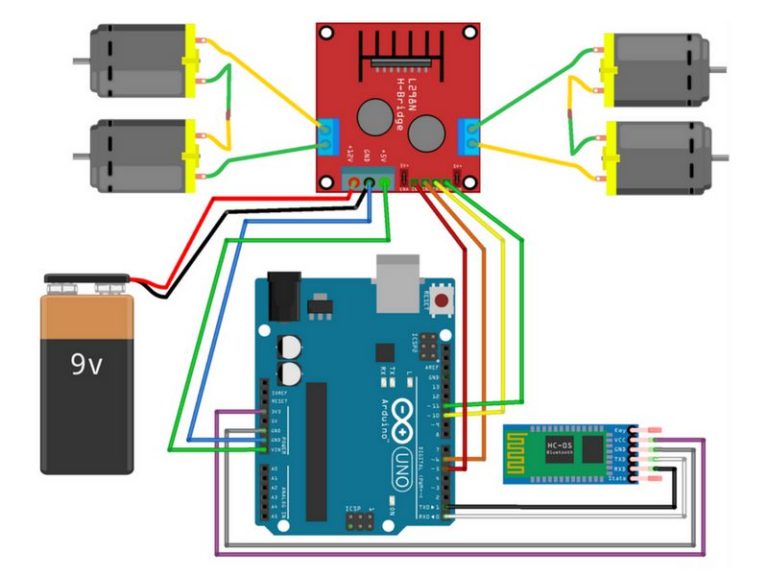
Android telefonlarınızla hemen hemen birçok işlemi rahatlıkla yapabilmektesiniz.Bu projemizin sonunda android kontrollü rc araba sahibi olacaksınız.Aşağıdaki adımları uygulayarak sizde kendinize bir araba yapabilirsiniz.Projenin amacı cep telefonunuza yükleyeceğiniz program sayesinde arabanızı istediğiniz gibi bluetooth üzerinden kontrol etmektir.
1 adet stokta
Açıklama
Ek bilgi
| Ürün Markası |
Yapboz |
|---|
Değerlendirmeler (3)
Android Kontrollü RC Araba için 3 değerlendirme
Marka hakkında




Kargo Süreci


İlgili ürünler

Arduino Dijital Metre
Ultrasonik sensörler mesafe ölçmeye yarayan kullanım alanı geniş bir üründür.Bu projemiz ultrasonik sensör kullanılarak mesafe ölçümü yapan bir cihazdır.Ürün size demonte olarak gönderilir isterniz kurulu ve çalışır olarak gönderilir.Tamamen açık kaynaklı olup programlayabilir kodlarında değişiklikler yapabilirsiniz.

Arduino LCD Nem ve Sıcaklık
Bu projemizde nem ve sıcaklığı lcd ekranda nasıl gösteririz bundan bahsedeceğiz.Sıcaklık ve nem ölçümü yıllardır kullanılan bir teknoloji biz bunu arduino ile kendimiz programlayarak yapacağız.Evinizde termostat olarak kullanabileceğiniz bir proje olarak düşünebilirsiniz.Öncelikle bu proje sadece evlerde değil otomobillerde buz dolaplarında bilgisayarlarda ve birçok alanda kullanıma uygundur.Projemizde kullanacağımız malzemelerimize bir göz atalım.

Arduino Manyetik Dedektör
Bu projemizde basit bir manyetik alan dedektörü yapımını göstereceğiz.Projenin basit bir devresi bulunmakta ,devreyi kurup projemizi çalıştırdığımız da eğer sensör manyetik alan görürse buzzer dan alarm sesi verecek ve rgb led kırmızı olarak yanacaktır.Bu sensörlerin diğer ismide Reed Röle olarak geçmektedir.Piyasada ararken bu isimlede arayabilirsiniz.

Arduino Park Sensörü
Şimdi sizlerle düşük bütçeli arduino ile bir proje yapalım.Buradaki amacımız günümüz araçlarında olan park sensörü mantığını kullanarak hareket edelim.Belli kademelerle yazdığımız kodumuzda yaklaşan cisme göre hem buzzer hem de led aracılığı ile yaklaşan mesafeyi algılamaya çalışacağız.Mesafe yaklaştıkça sıra sıra ledler devreye girecek ve buzzer yaklaşan cisme göre ses şiddetini arttıracak.

Arduino Saati Yazan Robot
Arduino saati yazan robot kol projemizde 3 adet servo motor ve 1 adet arduino kullanılmış çalışma mantığı ise basittir.O anki saati kalem yardımıyla mekanizmanın üzerine yazıp silmektir.Projenin tüm kodları ve 3d yazıcı için çıktı dosyaları aşağıdaki linkte mevcuttur.İsterseniz pdf içerisindeki çizimleri yazıcıdan bastırıp plastikten kesebilirsiniz.3d yazıcı ile çıkarma imkanınız varsa bu iş daha kolay olacaktır.

Arduino Sumo Robot 3D
3D baskı ile oluşturduğumuz sumo robot şasesine arduino ile programlayıp çalıştırabilirsinz.En temel malzemelerle hazırlanmış olan bu robotu sizde kendiniz evinizde rahatlıkla yapabileceksiniz. Projede kullanılan sumo robot şasesi PLA malzemesi kullanılarak %30 dolulukla basılmıştır.Robot amatör uygulamalar için robot yarışlarına uygun değildir.

Arduino Ultrasonik Radar Projesi
Çok geniş bir alanda tarama yapan bu radarlar hava araçlarının tespitinde kullanılır.Bizde bu projede buna benzer ama daha küçük ölçeklisini yapacağız.Bizim radarımız radyo dalgalarıyla değil ses dalgalarıyla ölçüm yapmaktadır.Bizim yaptığımız radar 150º lik bir alanda tarama yapabilmektedir.Projemiz arduino ve prosesing tabanlı çalışmaktadır.Arduino bölümü c++ ile yazıldı.








Hasan DİLBER –
Proje hazır olarak gönderiliyor mu
Proje Hocam –
proje hazır olarak gönderilmektedir.
tahaozaydin –
Hocam sa kendiniz mi yapıyorsunuz
Proje Hocam –
evet ürünler kendi üretimimiz
taha özaydın –
proje elimize geldikten sonra nasıl çalıştırmamız gerekiyor
Proje Hocam –
Proje dosyalarındaki android uygulama ile cihaza bağlanıp kumanda edebilirsiniz