






















































































ASSEMBLY Dili ile Arduino Kodlama
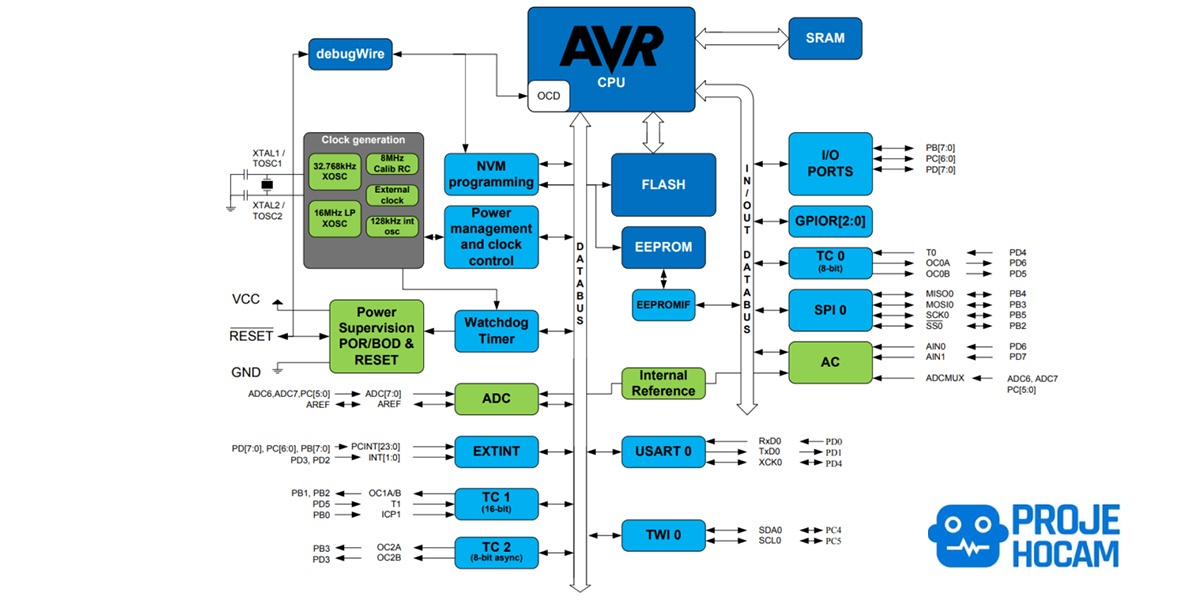
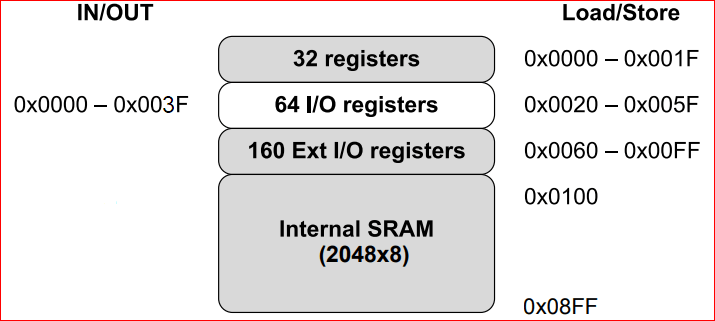
Burada dikkatinize çekilecek şey tüm saymaçların iki değişik adres ile çalışmasıdır: IOreg adresi ve Offset adresi. İkisinin arasındaki farkın da 0x20 olmasıdır. IN/OUT komutlarını kullanmak isterseniz IOreg adreslerini, LOAD/STORE komutlarını kullanmak isterseniz offset adreslerini kullanmanız gerekir.
5. AVR Gecikme Döngüsü Hesap Makinesi

AVR Delay Loop Calculator sitesi ASM dilinde kullanmak istediğimiz gecikme döngü kodlarını bize otomatikman veren bir site. Bunu nasıl kullanacağımızı inceleyelim:
- Bu siteyi çevrimiçi kullanmak istiyorsanız, yukarıdaki bağlantıdan ulaşıp hemen kullanmaya başlayabilirsiniz.
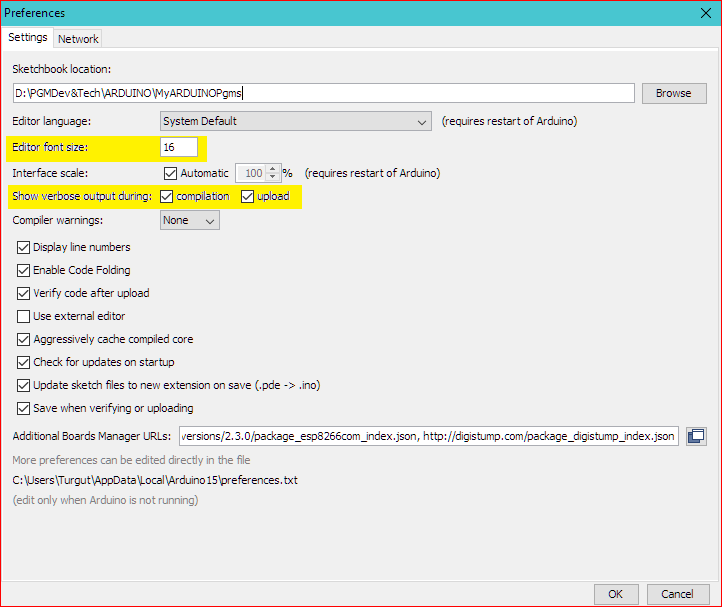
- Eğer çevrimdışı kullanmak istiyorsanız, sayfayı tarayıcınıza yükleyin. Yüklendikten sonra fare sağ tuşuna basıp “Farklı Kaydet” seçin ve “Web Sayfası, Tamamı” olarak bilgisayarınıza kaydedin. Bundan sonra Internet’e bağlanmadan kullanabilirsiniz.
Bu programın ilk kırmızı karesine işlemcinizin frekansını girin. Arduino UNO: 16MHz.
İkinci kırmızı karesine “ne kadar gecikme” istediğinizi girin. Burada 1 saniye gösteriliyor. Sonra da sağ taraftaki zaman birimlerinden birini seçin.
“GO” butonuna basınca alt tarafta kodunuz oluşacaktır. GO buton altında üstünde iki tane seçenek düğmesi göreceksiniz: biri assembler kod için, diğeri ise avr-gcc tipinde kod için. Biz buradaki kodu Arduino’nun avr-gcc derleyicisi ile kullanacağımız için, avr-gcc olanı seçin.
Kodun sarı kısmını kes / yapıştır ile programımıza aktarabiliriz.
Bu uygulamanın kodunu anlamak isteyenler şu linkten detaylarını inceleyebilirler: improved-delay-loop-calculator .
Arduino ve Assembly Kod Entegresi
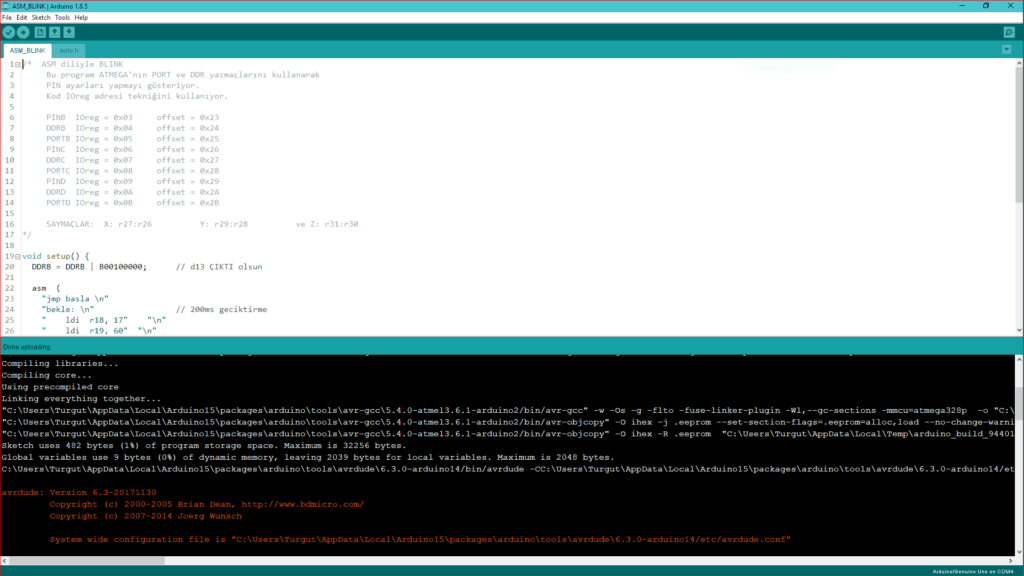
Arduino IDE’sinde çalışırken genelde C’ye benzeyen bir lisanda kodlama yapılır. Buna ilaveten özel bir fonksiyon kullanarak Assembly lisanı da kullanılabilir. Arka planda Arduino kodlarını işleyen GCC derleyicisi C-Kod ve assembly lisanda yazılmış kodların tümünü entegre edip Arduino’ya yüklediğimiz en son kodlamayı tamamlar.
Aşağıda bu entegreyi gösteren ufak bir örnek sunuyorum:
001-018: Program açıklamaları
019-021: SETUP kısmının başlangıcı. DDRB saymacı kullanarak D13 pinini OUTPUT (Çıktı) olarak ayarlıyoruz. DDRB saymacı dijital 8-13 pinlerini kontrol eder. Bu saymaç değerine ikili sabit B00100000 ile mantıksal OR (ve) işlemini uygulayınca D13 pinine rastgelen DDRB bit’ini 1 yapmış oluyoruz. Yani D13’ü çıkış olarak ayarlıyoruz.
022-040: Assembly dilinde kodumuzun ilk kısmı.
023: Satır 024-034 arasındaki bekle etiketli 200ms geciktirme kodunu işlemeden üzerinden basla etiketine atlıyoruz.
024-034: bekle adını verdiğimiz 200ms geciktirme kodu. Bunu AVR Gecikme Döngüsü Hesap Makinesi sayfasından aldık. Bu kodun bir alt yordam olarak çalışması gerektiğinden, siteden aldığımız kodun önüne bir etiket (“bekle: \n”) sonuna ise bir (” ret \n”) komutu ekledik. RET komutu kodun bu satırına gelindiğinde RETURN (geri dön) işlemiyle geciktirme kodunu çağıran yere geri döner.
035-036: basla etiketi. Önündekii boş satır sadece kolay okunsun diye.
037: İkili sabit 0b00100000 değerini r21 saymacına bit maskesi olarak yüklüyoruz. PORTB saymacı dijital 8-13 pinlerini kontrol ettiğinden bu sabit değerdeki 1 bit’i D13 pinini belirtiyor. r21 saymacı tamamen bizim isteğimizle seçilmiş bir saymaç.
038: ASM kodun sonunu belirten “)” parantez.
039: SETUP sonu.
041-048: LOOP döngüsü.
042: LOOP içindeki assembly kodumuzun başlangıcı.
043: PINB (IOreg = 0x03) saymacındaki anlık pin durum değerlerini r22 saymacına okuyoruz.
044: EOR işlemi: r21’de sabit bit maske değeri 0b00100000 var. r22’de 8-13 dijital pinlerin anlık durumu var. EOR işlemi bittiğinde r22 deki değer r21’in içindeki 1 bit’in olduğu yerde aksine dönüyor. r21 değeri aynı kalıyor. Bunu tekrarladığımızda r22 değeri gene r21’in içindeki 1 bit’in olduğu yerde aksine dönüyor. Böylece EOR kullanarak d13 pin ayarını 0 ve 1 arasında değiştiriyoruz.
045: OUT komutu r22 saymacındaki değişmiş değeri PORTB saymacına (IOreg = 0x05) yazıyor. Yani D13 led’in yanıp sönmesi donanıma yansıtılıyor.
046: 200ms gecikme yapan bekle alt yordam çağrılıyor. 024-034’de anlatıldığı gibi, bekle bitince bu noktaya geri döner.
047: ASM kodun sonu.
048: LOOP döngüsü sonu.
— KOD SONU —
ARDUINO Derleyici DİZİN ve DOSYALARI
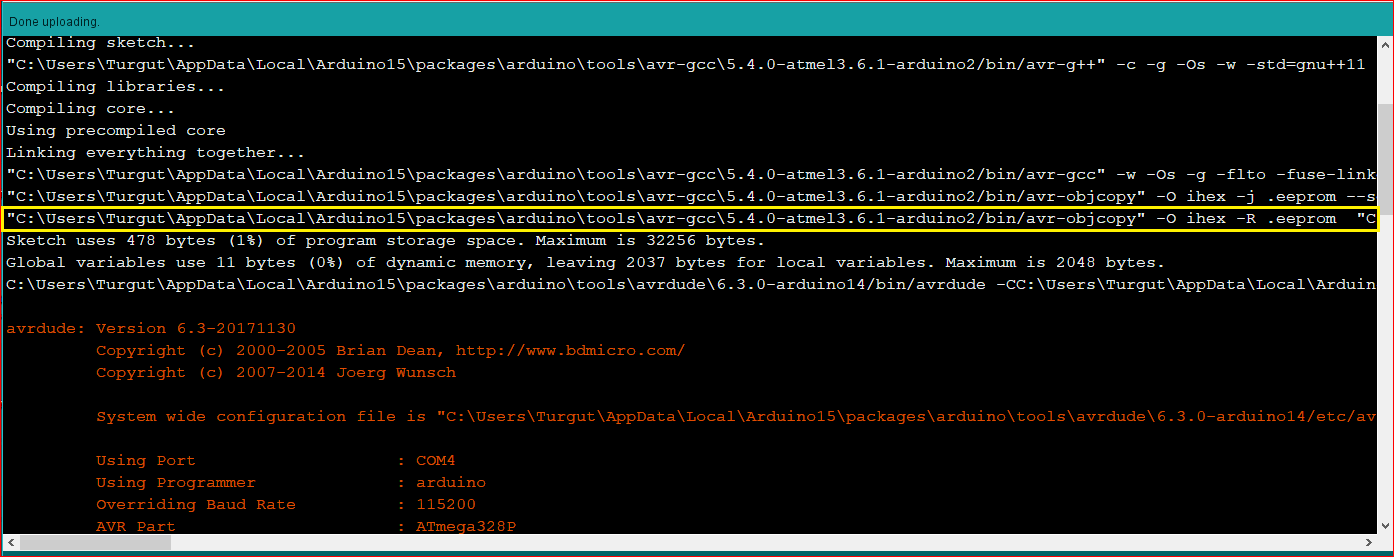
Yazdığınız Arduino kodları ![]() Verify/Compile (Denetle/Derle) veya Upload (Yükle) seçtiğinizde derleyici tarafından işlenip Arduino’ya yüklenecek HEX formatında bir dosya haline getirilir. Bunlar her butona bastığınızda işlenip bilgisayarınızdaki bir dizine yazılır. Bu yöntemi kodlama ekranı altındaki alanda izleyebilirsiniz:
Verify/Compile (Denetle/Derle) veya Upload (Yükle) seçtiğinizde derleyici tarafından işlenip Arduino’ya yüklenecek HEX formatında bir dosya haline getirilir. Bunlar her butona bastığınızda işlenip bilgisayarınızdaki bir dizine yazılır. Bu yöntemi kodlama ekranı altındaki alanda izleyebilirsiniz:
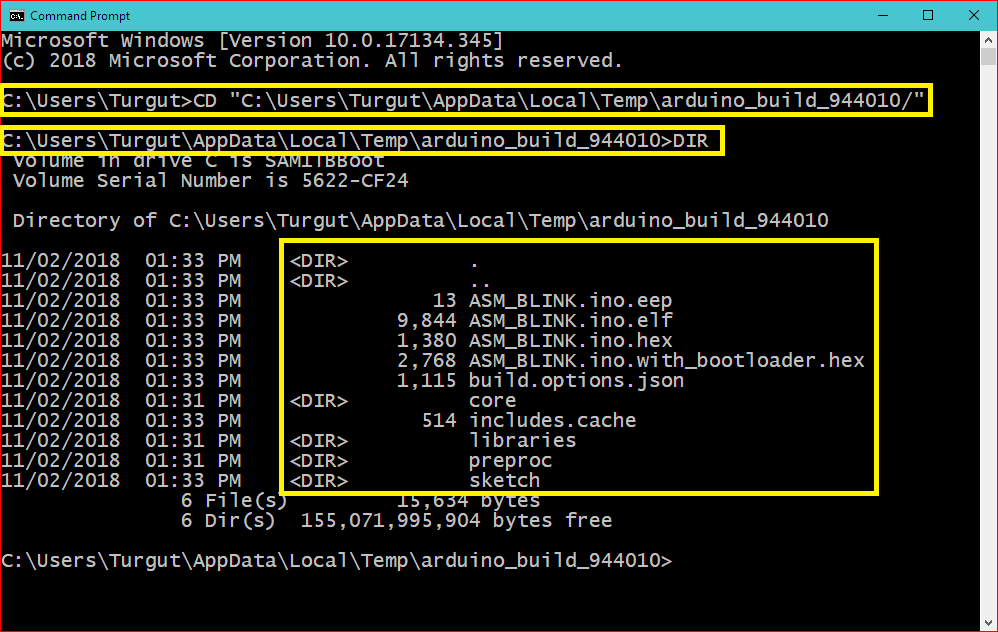
Arkasından DİR komutu ile buradaki dosyaları listeleyin. Yukarıdaki resimde gördüğünüz gibi bir listeye ulaşmanız gerekiyor.
Buradaki dosyalar, sizin ![]() butonlarına bastıktan sonra yaratılan dosyalardır. Bunların arasında bizim enterese olduğumuz .ELF uzantılı dosya.
butonlarına bastıktan sonra yaratılan dosyalardır. Bunların arasında bizim enterese olduğumuz .ELF uzantılı dosya.
Bu dosyayı AVR-GCC dereyicisi kumandaları ile ASSEMBLER kod listesi halinde görüntüleyebiliriz:


